Velocity Prediction Programs (VPP)
VPPs
We've all heard tacticians and naval architects talk about them...the 'VPP' and their associated speed polars'. But what are they, besides catchy sailing buzzwords? And how do they work? More importantly, are they even accurate?
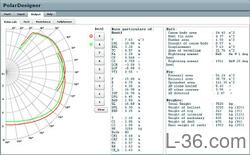
The VPP, or Velocity Prediction Program, is a complex computer program that estimates the performance of a sailing yacht, given certain boat and environmental data. The speed polar diagram is the graphical output of the VPP, consisting of the theoretical maximum boat speeds at various true wind speeds and headings, along with the associated upwind and downwind VMGs (velocities made good). Tacticians use the polar diagrams to determine whether or not the boat is sailing at its maximum speed or VMG, and naval architects use them for a variety of things; mainly to estimate the performance of their new design, or for comparing systematic changes (keel/rig size) in a design.
The VPP consists of input values, some independent variables, the aerodynamic and hydrodynamic models, and the big daddy of them all; the solution subroutine. The program works by adjusting the independent variables until a particular set of equations is solved, balancing the aerodynamic and hydrodynamic forces of a yacht. These equations govern the physics of the sailing yacht, and must be solved together so that the boat sails in a 'steady' state. Although there are a total of six equations, which balance the forces and moments in the six degrees of motion, I will only discuss two of them. They are the equation in surge (movement along the longitudinal axis) and roll (rotation about the longitudinal axis), respectively:
FDRIVE = FDRAG: Sail driving force = Total drag
MHEEL = MRIGHT: Sail heeling moment = Righting Moment
For simplicity, most VPPs assume that the yacht will "naturally" be balanced for all other motions, so that the six equations reduce to the two listed above.
The input values include sail areas and rig dimensions, hull characteristics (length overall, waterline length, beam, displacement, righting moment, etc...), non-dimensional hull form coefficients, keel, bulb and rudder dimensions, crew numbers and their hiking positions, and lastly the true wind speeds and true wind angles. The independent variables consist of boat speed, heel angle, flattening and reefing coefficients (simulating sail flattening and reefing controls) and crew position (simulating how hard the crew is hiking). The aero model contains experimental data for the sails and rigging, and is used to determine the aerodynamic forces/moments. Likewise, the hydro model contains experimental data for the hull and appendages, and is used to determine the hydrodynamic forces/moments. Finally, the solution subroutine is a complex algorithm responsible for iteratively adjusting the variables until the set of equations is solved.
The aerodynamic model is applied first. The initial true wind speed and heading is prescribed for the first condition, while the program assumes some initial values for the independent variables. Using basic trigonometry, the apparent wind speed and angle can be computed. Now using the apparent wind speed and angle, the sail set (upwind or downwind) and sail forces can be determined. Lastly, using some of the variables and rig geometry, the aerodynamic sail forces can be resolved into the forward driving force (FDRIVE), the heeling side force (FHEEL), and the aerodynamic heeling moment (MHEEL).
The hydrodynamic model is applied next. First, the leeway angle is calculated from the hydrodynamic sideforce (FSIDE), which is set to equal the aerodynamic heel force (FHEEL). Next, using a regressed hydrodynamic model such as the Delft Series , the hydrodynamic righting moment, hull drag and appendage drag can be computed. The drag component are summed up to find the total drag FDRAG, and the various righting moments (hydrostatic, hydrodynamic and crew) are combined to determine the total righting moment (MRIGHT).
In the solution subroutine, the aerodynamic forces (FDRIVE, MHEEL) are compared to the hydrodynamic forces (FSIDE, MRIGHT) to determine the "balance" of the yacht. If the two equations cannot be solved simultaneously, the solution subroutine will systematically adjust the variables (which require updating the aero/hydrodynamic forces) until the equations are all satisfied. This usually involves a long iteration process, where the adjustment of one variable will require subsequent adjustments to the other variables. When the force and moment equations are eventually in balance for the given wind condition, the results are recorded and the next wind speed/angle combination is initiated. The program is complete when it has run through all true wind speeds and angles prescribed by the user. The output values are then grouped by the program and organized into relevant tables, graphs and pretty pictures (the speed polar diagram).
Most standard VPPs do a pretty good job of predicting the theoretical boat speeds and heel angles for the typical semi-displacement cruiser/racer. The generic aero/hydro models used for computation are broad enough to accommodate most hull forms, though the broad range slightly decreases the accuracy. For analyzing multihulls, America's Cup yachts or planing yachts with canting keels and water ballast, specialized and/or high-end VPPs are required. They usually have an increased number of inputs, such as variable sea-states, wind sheer, canting keel options, water ballast options or multiple head sail options, and allow for customized aero and hydro models via wind tunnel, CFD and/or towing tank test results. Their solution subroutine can be more complicated, so that more than just the two equations are solved, and there are usually more output values, so the user can see such things as the individual components of the drag budget, the leeway angles, etc... Some even have custom weather and course routers, allowing the designer to virtually sail the boat around a course and determine elapsed times.
Regardless of how the speed polars are determined, there are limitations to their use and accuracy. First of all, the polars are created under ideal conditions: sails are trimmed perfectly, hulls are clean, keels are fair, the wind is steady, and many assumptions are made allowing the program to work quickly. In the real world; sails stretch, hulls get dirty, keels get chipped, weight gets shifted, the boat flexes...you get the picture. In other words, the accuracy of the VPP is dependent on how closely the boat and sails match the 'ideal' tested condition. So it's up to the owner and crew to keep the boat and sails in top shape. Secondly, the VPP usually doesn't account for some scenarios like slamming in chop or surfing in swells. Therefore, upwind target speeds could be over-predicted, and downwind speeds could be under-predicted. Fudge factors may need to be applied for certain conditions, and unfortunately they can vary boat to boat (even in one-design).
There are many commercially available VPPs (IMS, WinDesign, AeroHydro, Span, PCSail), some secret VPPs used for rating rules (IRC, Americap II) along with some proprietary VPPs that are only used in-house by individual design firms. Some of them are available for free downloads of trial versions with limited uses, so it might be worthwhile for the interested sailor to check them out (although they all require a basic understanding of naval architecture or boat design). And for the really interested students, the book "Sailing Yacht Design: Theory", by Claughton, Wellicome and Shenoi offers an even more detailed explanation of VPPs, among other things.
So here's the short, short version, for people that don't like to read long articles. The VPP is basically a fancy calculator. Input values are entered, the calculator works its voodoo, and polar diagrams magically pop out. Most VPPs do a pretty good job predicting the speed of "conventional" boats, but the high-end racing yachts require high-end VPPs for accurate results. Assuming that the speed polars were created with a reasonable VPP, the target speeds will only be accurate if the boat is sailed correctly, the sails are in good shape, and the sailing configuration is close to the configuration as tested in the VPP. This article is only the tip of the iceberg. VPPs are complex beasts, and are continually evolving. If you want to learn more, try using one, or read up on them.
NOTICE: Some pages have affiliate links to Amazon. As an Amazon Associate, I earn from qualifying purchases. Please read website Cookie, Privacy, and Disclamers by clicking HERE. To contact me click HERE. For my YouTube page click HERE